Projects
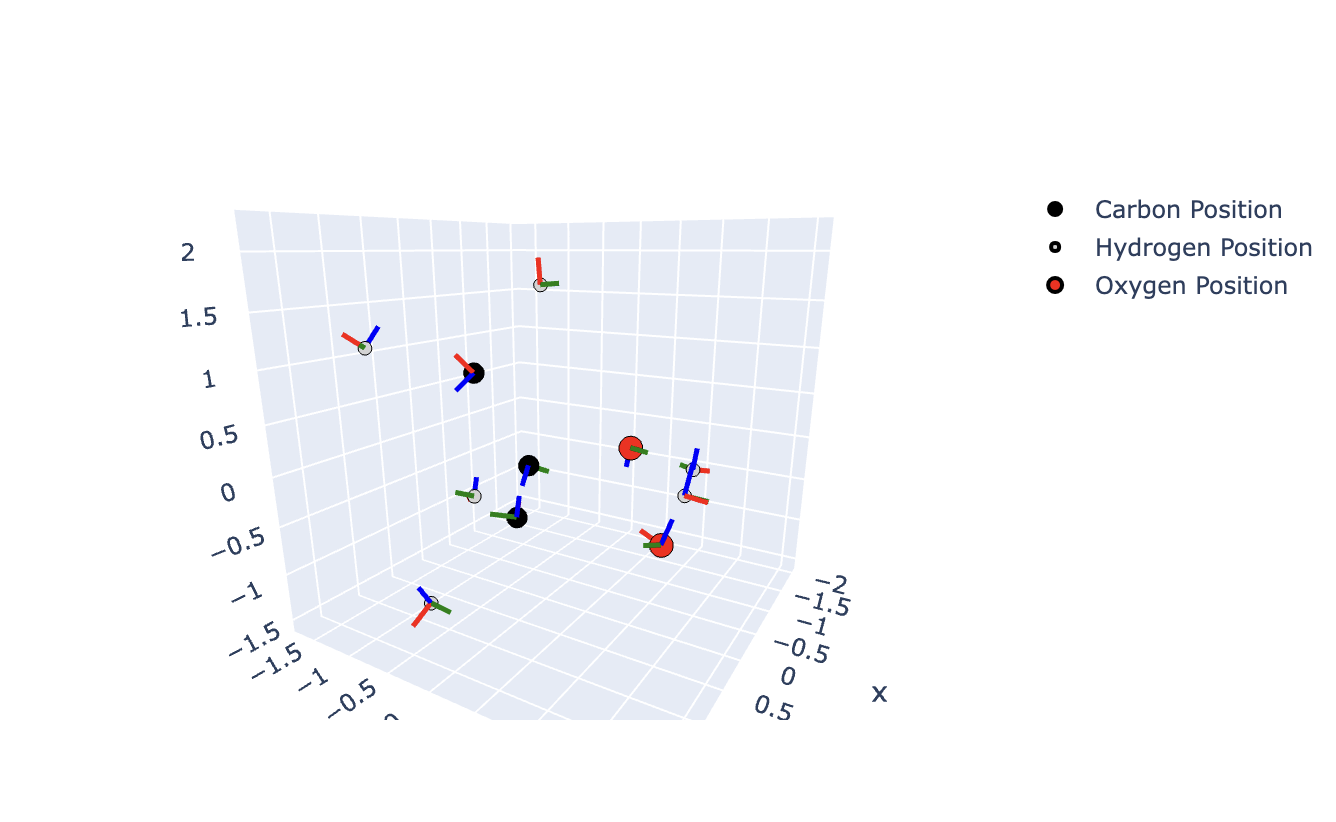
Covariance-Based Local Reference Frames on Geometric Graphs
Geometric Deep Learning, University of Oxford - 2024Covariance-based LRFs on molecules to obtain invariant features for molecular property prediction.
Mini project for the Geometric Deep Learning course at the University of Oxford.
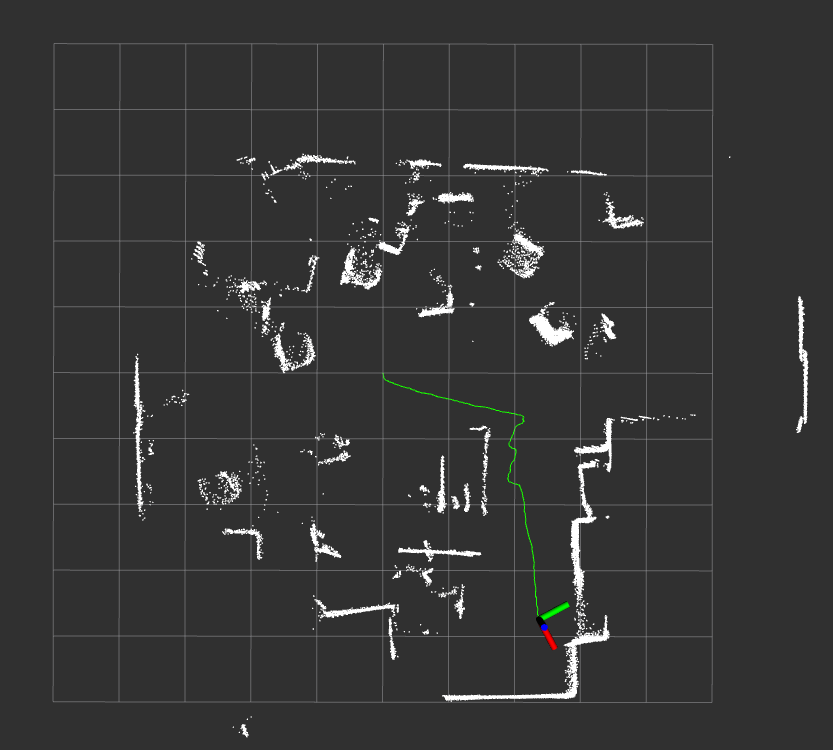
A1 SLAM
Borglab, Georgia Tech - 2023Open-source code of a modular SLAM system for the A1 quadruped robot.
Code | Preprint
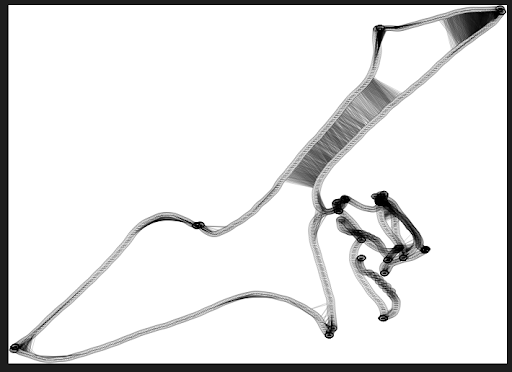
FL2BIPS - Hilti Challenge 2022
Borglab, Georgia Tech - 2022PoseSLAM pipeline to recover the sensor pose trajectory in difficult conditions.
Competed in the Hilti Challenge 2022.
Preprint
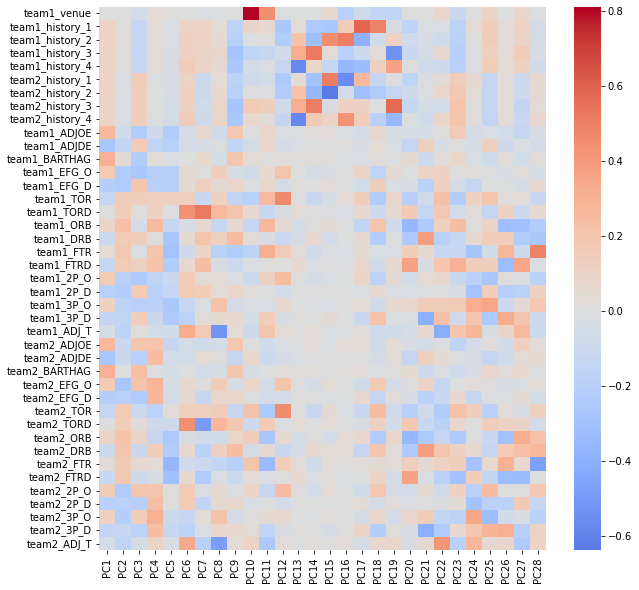
NCAA Basketball Prediction
CS4641: Machine Learning, Georgia Tech - 2023Predicting the outcome of two NCAA basketball teams.
Project Page
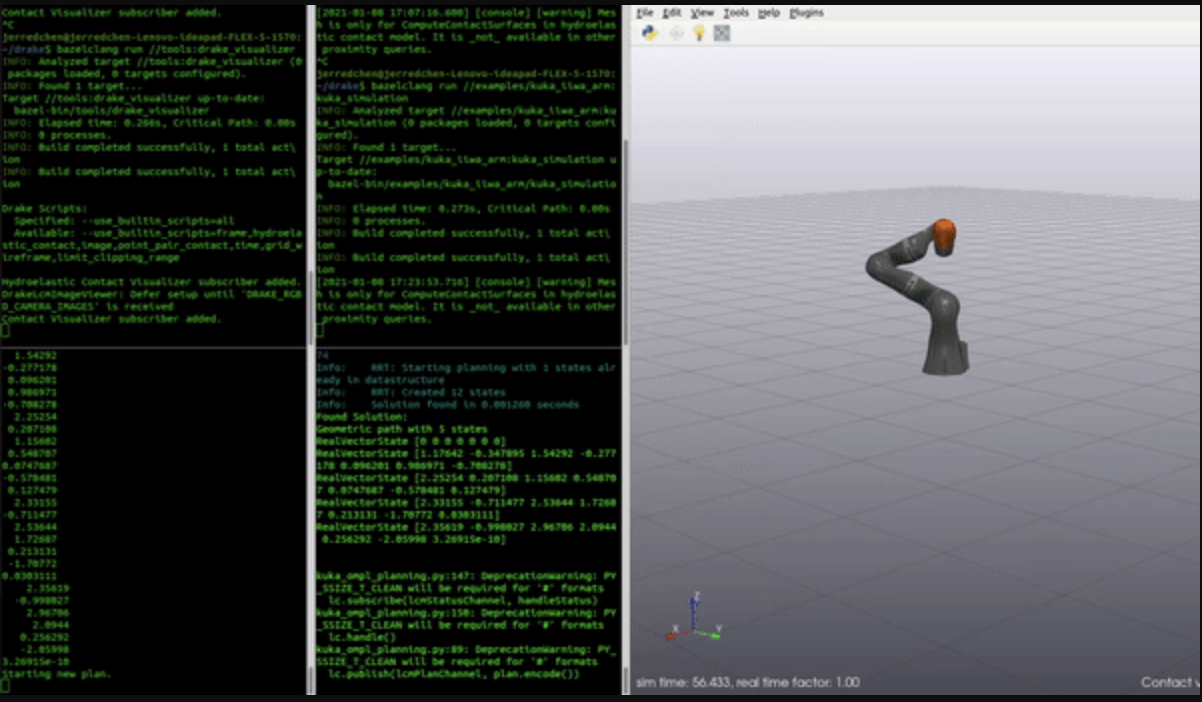
RRT with KUKA Arm Simulation
LIDAR Lab, Georgia Tech - 2020RRT path planning for a KUKA arm.
Code